11
-
- VIBRATION - An Introduction to Applications
- ‘Classic Engineering Examples’
Earthquake Response
Unbalanced Rotating Machinery
Wind Induced Vibration of Power Lines
Flutter Of Aircraft Wings
Turbine Wing Flutter
Personal Care - Electric shavers and electric toothbrushes.
Personal Communications - Mobile phones, tablets.
Music -
- Vibration – Introduction:
- Vibration deals with oscillatory behaviour of components, structures and machines.
A body that possesses both mass and elasticity is capable of vibrating.
Vibration of a body is motion that is repeated either uniformly or randomly.
Vibration needs energy (power) to produce and sustain it – reducing efficiency.
Vibration causes fatigue and hence can shorten life expectancy of structures.
Two general types of vibration – free and forced.
Free: motion maintained by gravity or elastic restoring forces.
Forced: motion caused by external force application.
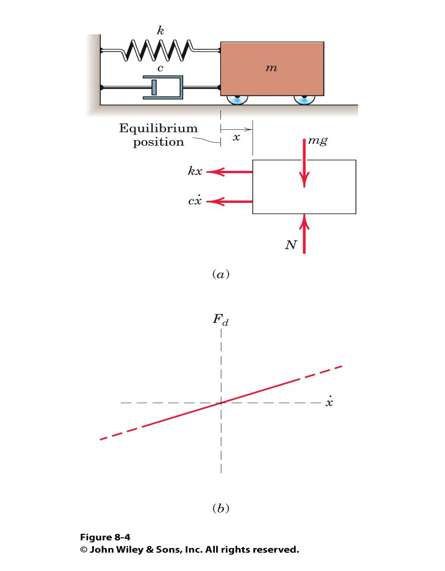
Vibration, free or forced, can be undamped or damped.
Undamped: vibration continues indefinitely, friction ignored (theoretical).
Damped: real systems are damped, vibration reduced or controlled.
Vibration in one direction (eg. x-axis) is termed a one or a single degree-of-freedom vibrating system. -
- Free Undamped Vibration
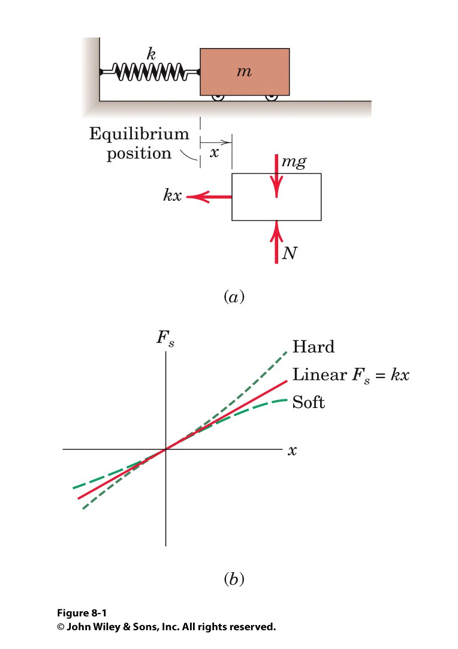
- Consider the single degree-of-freedom undamped, freely vibrating system shown below.
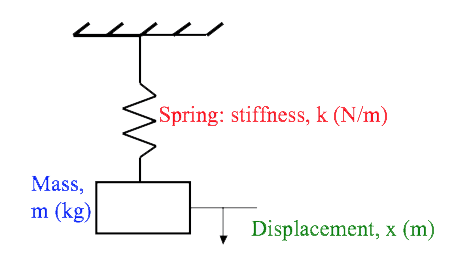
Vibration is caused if the mass is displaced by a distance x (m) from its equilibrium position and then allowing the spring to apply its restoring force to the mass.
The mass will accelerate and reach max. velocity at x=0 (equilibrium position). Spring decelerates the mass until it comes to rest. This motion continues indefinitely since no damping present.
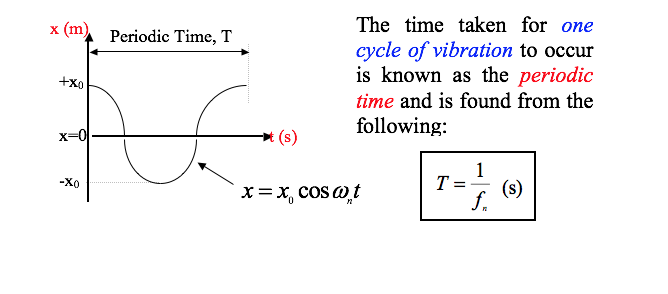
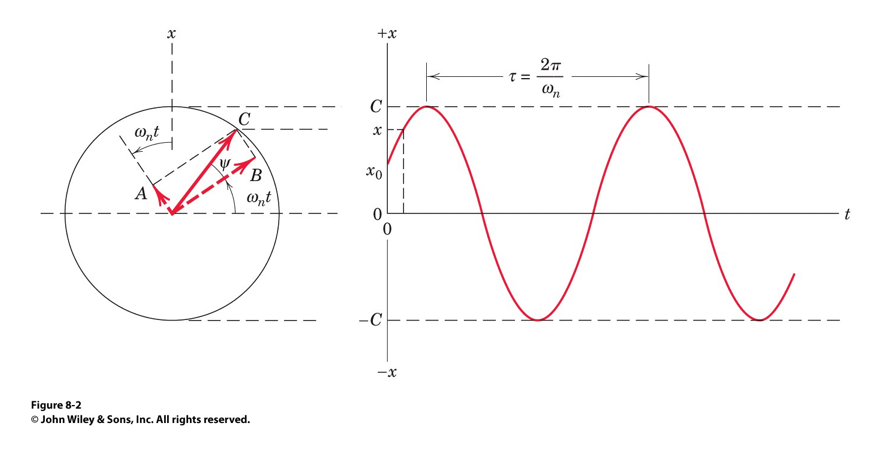
The motion can be shown on a vibration amplitude vs. time graph.
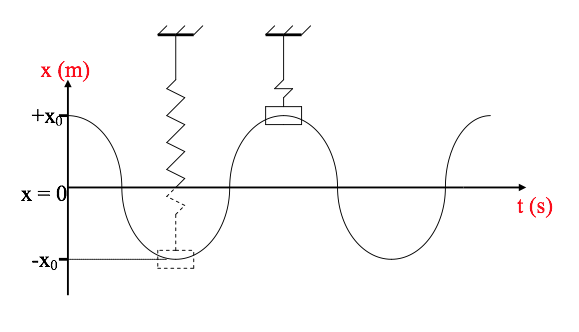
x0 is the initial displacement of the mass from equilibrium position and hence is the amplitude of vibration, remaining constant since damping is not present.
The motion can be analysed by considering Newton’s 2nd law of motion: ΣF=ma
and this gives for the mass displaced by x (m):
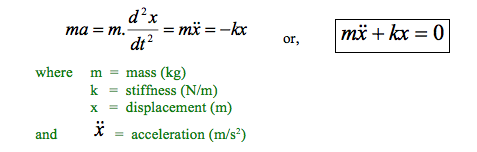
This is the Equation of Motion for a one degree-of-freedom freely vibrating undamped system, and its solution will give the displacement x in terms of time t.
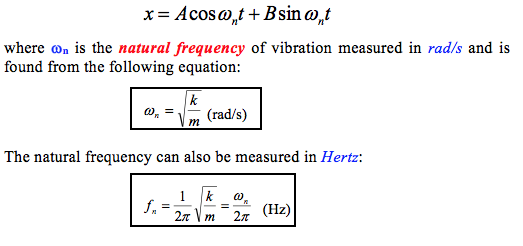
The equation is a 2nd order linear differential equation where the general solution consists of a complementary function + Particular Integral. The complementary function is obtained from the left-hand side term of the equation and the Particular Integral from the right hand side (in this case PI = 0). The complementary function is given by the following:
In the case just described, the initial conditions are: t = 0, x = x0 and = 0
Therefore, solving the complementary function for the constants A and B gives the following displacement function: x = xocos ωnt (m)
This function is shown in the x-t graph, and is the same as previously predicted:
Stiffness
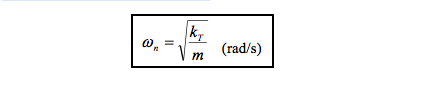
From the equations given previously for the natural frequency of a vibrating body or system, the body or system stiffness must be ascertained.
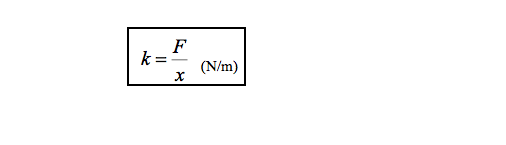
The basic definition of stiffness is: the ratio of force (N) to deflection x (m), i.e.
System Stiffness
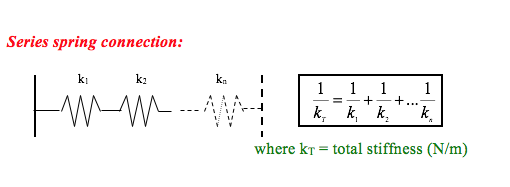
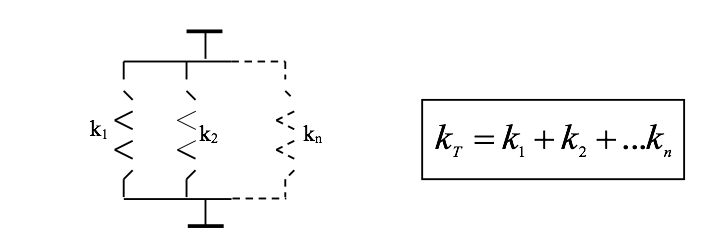
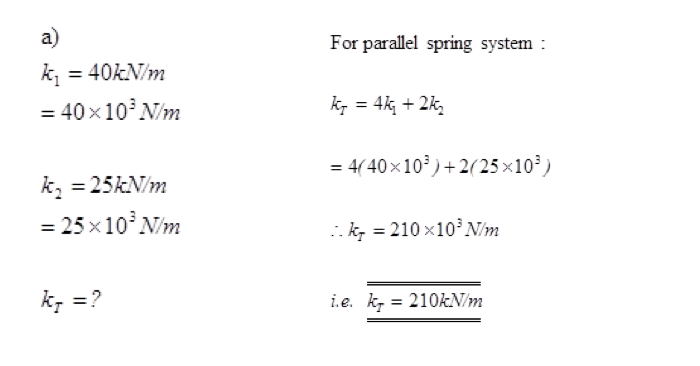
It is very common to find systems with more than one spring - these can be arranged in series or in parallel and hence an overall or total system stiffness kT has to be calculated.
System Stiffness
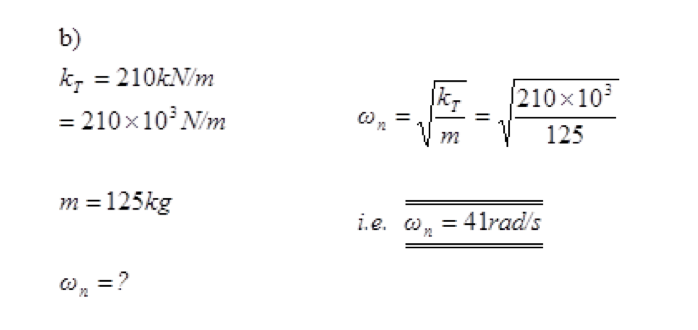
Hence, with the system total stiffness calculated, the natural frequency can be determined as follows:
-
- Kinetics
- Worked Example 1: Free, Undamped Vibration
- An electric motor of mass 125 kg is supported by six springs, which are arranged in parallel. Two of the springs have an equal stiffness of 25 kN/m and the remaining four have equal stiffness of 40 kN/m. Determine:
(a) the total stiffness of the spring system; (b) the natural frequency of free vibration of the motor in rad/s; (c) the time elapsed after 10 cycles of free, undamped vibration.
 Worked Example 2: Free, Undamped Vibration
Worked Example 2: Free, Undamped Vibration
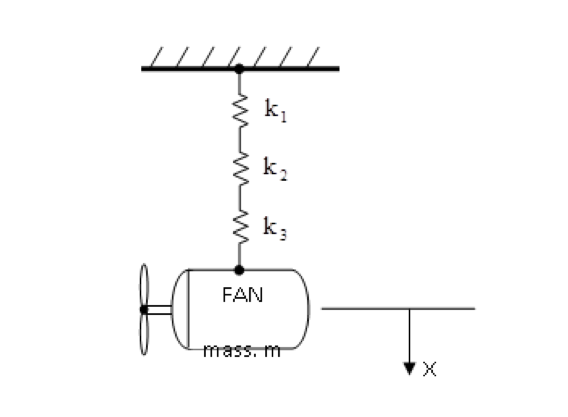
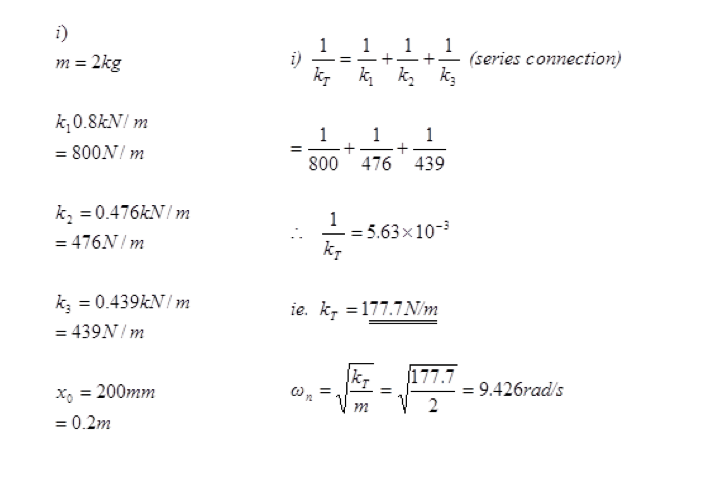
- A small cooling fan of mass 2kg is supported on a system of 3 springs connected in series. The springs have stiffnesses of 0.8, 0.476 and 0.436 kN/m respectively. If, during fan operation, the fan vibrates freely with an amplitude of 200 mm, determine:
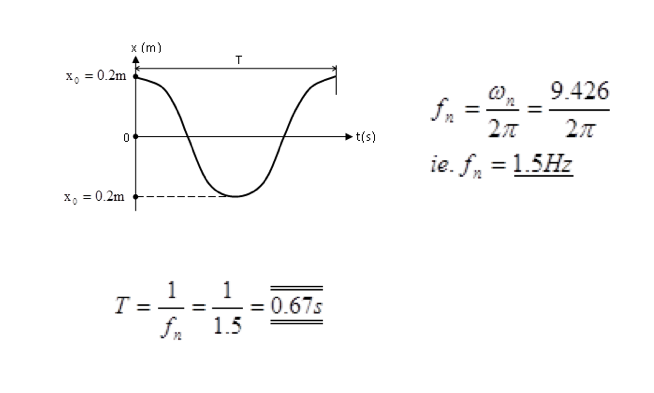
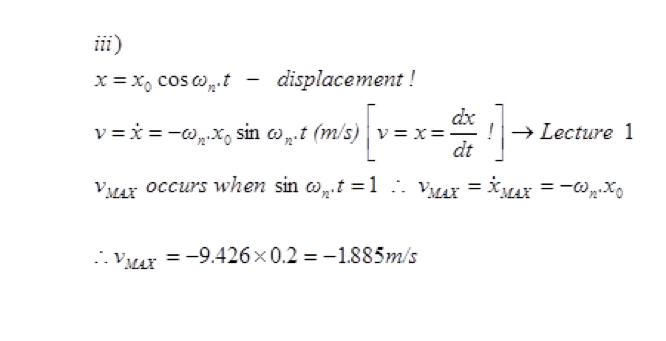
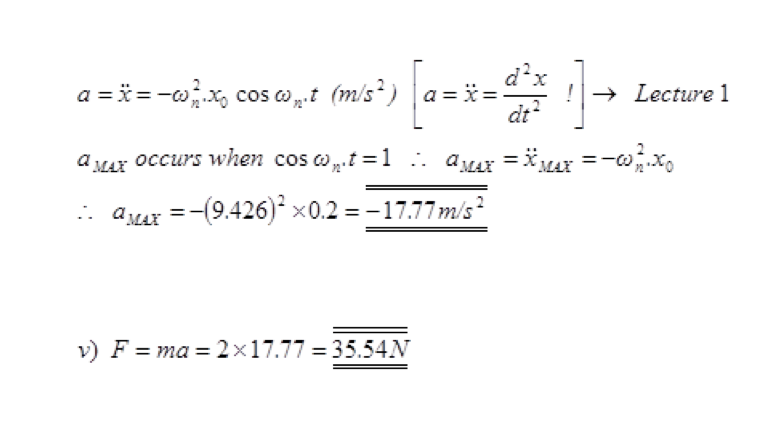
(a) the natural frequency of free vibration of the fan in rad/s; (b) the periodic time, (c) the maximum velocity; (d) the maximum acceleration; (d) the maximum restoring force.
-
- Vibration Problems
1. Determine the natural frequency and periodic time for a motor of mass 5 kg mounted on 4 supports each of stiffness 10 kN/m, arranged in parallel. 2. A vibrating system has a natural frequency of 3.75 Hz and an overall stiffness of 200 kN/m. Determine the mass of the system 3. A motor of mass 25 kg is mounted on a platform which is supported by 8 springs in parallel, each of stiffness 0.6 N/mm. Ignoring the mass of the platform on which the motor is mounted, determine:
i) the total stiffness of the springs in N/m;
ii) the natural frequency of vibration of the motor, in Hz.
4. A spring of stiffness 2 kN/m is attached to a mass of 8 kg which is at rest on a frictionless horizontal surface with the spring unstretched. The mass is moved and released such that the system now vibrates freely with an amplitude of 25 mm (neglect friction). Determine:
i) the natural frequency of the system;
ii) the maximum acceleration of the mass, given that for free vibration: mx + kx=0
5. An object of mass 2 kg moves with simple harmonic motion with a frequency of 1.5 Hz and an amplitude of 200 mm. Determine:
i) the maximum velocity;
ii) the maximum acceleration;
iii) the maximum restoring force.
6. An object moving with simple harmonic motion has a frequency of 5 Hz with an amplitude of 100 mm. Determine:
i) the maximum velocity;
ii) the maximum acceleration;
iii) the time taken to move from the extremity of the oscillation to a distance of 50 mm from the equilibrium position;
v). the acceleration 50 mm from the equilibrium position
7. An electric motor of mass 20 kg is mounted on four springs in parallel. Each spring has stiffness of 15 kN /m. Determine:
i) the natural frequency of the system;
ii) the periodic time .
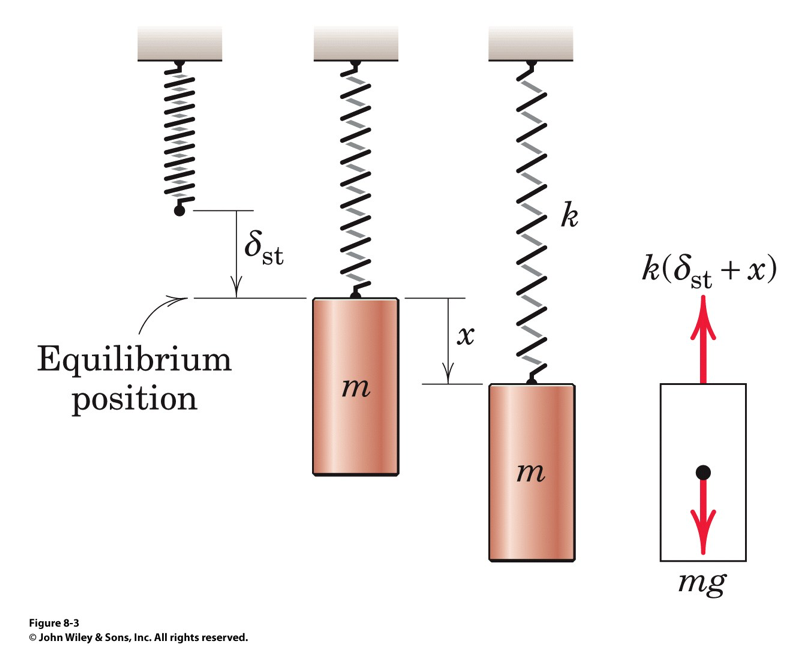
8. A mass of20 kg is hung vertically by three springs connected in series, k1 = 65 kN/m, k2 = 25 kN/m and k3 = 20kN/m. Determine:
i) the total stiffness of the three springs;
ii) the natural frequency of vibration (fn) of the mass in Hz;
iii) the combined extension of the three springs due to the hung mass.
9. A spring of stiffness 0.5 N/mm is attached to a mass of 3.5 kg and is at rest in the horizontal position with the spring unstretched. The mass is now moved and released such that the system vibrates with an amplitude of25 mm.(Note: for free vibration, take X=X0 cos(ω nt)).
Determine
i) the natural frequency in Hz;
ii) the maximum velocity;
iii) the maximum acceleration.